
Ceci est une ancienne révision du document !
Table des matières
Fabrication d'un PushTo pour le TLM
But du projet et références
Le TLM est le télescope du club (type Dobson), que nous avions fabriqué en 2013 (voir cette page qui raconte toute l'histoire, et notamment pourquoi il s'appelle TLM).
Un pushto est un système d'aide au pointage. Il permet de guider l'observateur qui déplace manuellement le télescope vers le bon endroit du ciel. Les télescopes de monture Dobson ne peuvent pas être équipées d'un Goto (un système plus complexe - et plus cher - qui envoie directement le télescope sur la cible, avec des moteurs). Donc le pushto est un bon compromis.
L'idée est proposée par Pascal qui a trouvé des instructions détaillées sur instructables. Le montage utilise des encodeurs pas à pas et un Arduino pour mesurer les positions du télescope et aider au pointage.
Présentation de Pascal :
pushtotlm.pdf
La version traduite en français (merci Jean-Christophe).
Première séance (20/12/2019)
Présents : Pascal Jean-Christophe, Christophe, Michel L, Patrick B, Maïté et Philippe, Pierre-Michel, Richard, Pascal B, Fred
Merci Maïté pour les petits gâteaux alsaciens et Jean-Christophe pour les chocolats !
Présentation de Pascal
Pascal nous explique le fonctionnement des codeurs pas à pas et comment utiliser l'Arduino pour décoder les signaux électriques et en déduire leur position absolue. En prime une démo en direct avec de vrais codeurs et un Arduino.


Les planches de Pascal :
encoder.pdf
Il faudra pour notre montage un Arduino un peu plus puissant que le modèle de base (Arduino DUE).
Conception du montage
Réflexions de groupe pour trouver la meilleure adaptation du montage à notre cas.
Disque en élévation
On le fixe à l'intérieur du TLM. Il est au bord de la caisse, donc sans masquage du miroir.
Le capteur peut se fixer sur l'intérieur, côté sud.
Débattement 90 degrés ⇒ pas de gène pour mettre le TLM horizontal.

Disque en azimut
Ce cas est plus compliqué car actuellement il n'y a pas la place ni sous la caisse, ni sous la monture.
Après avoir étudié plusieurs possibilités, nous décidons de fixer le disque sous la monture du TLM, et le capteur sur le socle.
Avantages : simplicité et faibles contraintes mécaniques.
Inconvénient : nécessite de rehausser la monture ⇒ il faudra remplacer l'axe par un autre plus long, et remonter d'autant les 3 patins en téflon (avec des cales en bois).

Cas d'un disque sous le socle (non retenu) :

Mesures :
- caisse = 35 cm de côté
- socle = 34 cm de côté
On décide aussi de refaire le socle avec un rond de diamètre 60cm + 3 pieds réglables (meilleure stabilité su sol irrégulier + réglage de l'horizontalité).
Pour les disques : contreplaqué ép 8
Important : nous choisissons de mettre la courroie avec les crans en interne, et de mettre la poulie en tension.
Il faut donc des disques un peu plus petits (selon la distance de la poulie).
Cette solution permet d'absorber les jeux, et éviter la complexité des ressorts pour mettre en tension la poulie sur le disque.
2e séance (10/1/2020)
Présents : Pascal A, Jean-Christophe, Michel L, Patrick B, Maïté et Philippe, Pascal B, Marie-Lise, Cédric, Fred
Merci à ceux qui ont apporté galettes, petits gâteaux et chocolats !

Présentation de Michel
Michel nous fait une démo de son programme pour utiliser un Arduino avec un module GPS. Ceci permet de récupérer automatiquement la position et le temps sans avoir besoin de les rentrer dans le programme manuellement. Il possède un mode démo qui envoie des valeurs de positions prédéterminées, et dont on voit l'évolution dans Stellarium.


le prototype élaboré par Michel (avec affichage lcd des données gps, temps sidéral, simulation avec des potentiomètres : impressionnant !)

Finalisation de la carte permettant d'adapter les signaux de l'Arduino Due à 3.3 V (les carte MEGA et Uno fonctionnent avec un niveau de signal fixé à 5V : en l'absence de pont diviseur de tension cette tension de 5V pourrait détruire la carte arduino Due). Le niveau 3,3 est ajusté sur chacune des 2 voies des 2 codeurs par action sur les potentiomètre et vérification de la tension avec un multimètre
Prochaine étape : intégration des améliorations développées par Michel

Fabrication du nouveau socle
Jean-Christophe a fabriqué le socle triangulaire. Il monte en séance les 3 pieds réglables.
Poursuite de la conception de l'adaptation du TLM
Les roues dentées et les courroies sont approvisionnées. Nous avançons dans la réflexion pour raccorder les codeurs et les disques. Contrairement au plan, nous avons choisi la dernière fois de mettre les courroies avec les crans en dedans, et donc fixer les codeurs un peu excentrés par rapport aux disques. Il faut donc recalculer le rayon des disques sachant que la longueur des courroies est imposée.
Cette question a donné une scène intéressante : une partie du groupe s'est lancé dans les calculs, et l'autre a choisi une démarche empirique en fabriquant des disques en carton de différents diamètres.

Dans le groupe “calculs”, Michel a montré avec brio son aisance avec les équations, puis a résolu avec un équivalent de mathlab le système 2 équations à 2 inconnues, non linéaire donc sans solution analytique. Le résultat est 17.6 cm (rayon d'un disque).




L'autre groupe “empirique” a obtenu un bon résultat avec un disque de carton de 17 cm ⇒ ouf, les 2 concordent !


Nous choisissons donc de fabriquer 2 disques de diamètre 17 et d'épaisseur avec un petit épaulement pour que la courroie reste en place. Voici le plan :

La prochaine étape est donc de trouver une plaque de PVC ou polyéthylène de dimensions 36×18 cm minimum et d'épaisseur 1 cm (imposée) puis de faire tailler les disques dedans.
Une autre voie serait d'imprimer une poulie GT avec 266 dents : cf aperçu du fichier stl

3e séance (7/02/2020)
Présents : Jean-Christophe, Christophe, Michel L, Maïté et Philippe, Pascal B, Pascal A, Fred
Partie Electronique
Présentation de l'avancement des travaux de programmation
Retour par Michel des considérations liées au calcul du temps sidéral et des conversion Az, Alt en RA,DEC
electronique_et_programmation_pushto.pdf

Partie Initiation à l'électronique
Présentation du matériel de base nécessaire
- Tapis de soudage
- Fer à souder 15 à 30W
- Soudure fine
- Pince coupante fine
- Pince à dénuder automatique
- Multimètre

Petite présentation de l'utilisation d'un multimètre utiliser un multimètre
Présentation des composants usuels : résistance (code couleur), condensateurs, diodes, led, transistor, circuits intégrés
La breadboard et ses connexions,
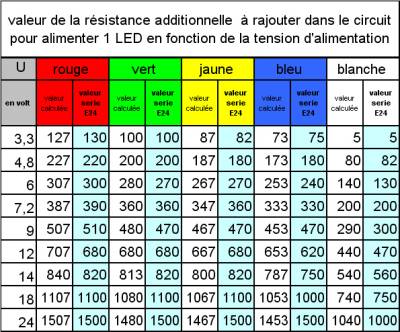
Crédit willswingscockpit.blogspot.com - ce tableau donne la valeur théorique de la résistance et sa valeur approchée dans la série normalisée ; cette valeur peut être calculée avec la loi d'ohm U=RxI en prenant pour i des valeurs entre 5 et 30mA selon les caractéristiques de la diode et l'éclat souhaité
Travaux pratiques : Maïté soude une led avec sa résistance de 470 ohms qui est testée sur l'alimentation +5V de l'Arduino : la led s'allume, épreuve réussie !
Démonstration de l'utilisation de l'outil de wrapping qui permet de faire des prototypes sans soudure
Partie mécanique
Modélisation sur ThinkerCad : Bravo J.C!
Décision d'opter pour un entraînement direct du codeur par la courroie exactement ajustée sur un disque de médium (Jean Christophe se charge de fabriquer les disques)
Nous adapterons les codeurs avec un système mobile + ressort de rappel (sera travaillé lors de la prochaine séance)
une des flasques de la poulie des codeurs devra être éliminée pour être entraînée par le disque.
Post séance
Réalisation des deux disques par Jean-Christophe : reportage étape par étape
Impression 3D de deux poulies (Pascal)